SG Serisi Servo Motor Sürücülerin PID Ayarları
Servo `Motor,` Pozisyon kontrol modunda ilk yapılacak işlem parametre 5 değerinin kontrolüdür. Bu değer her hız durumunda (kalkış, yol ve duruş) sistemi kararlı hale getirir yaylanmaları engeller.
Servo Motor, Pozisyon kontrol modunda ilk yapılacak işlem parametre 5 değerinin kontrolüdür. Bu değer her hız durumunda (kalkış, yol ve duruş) sistemi kararlı hale getirir yaylanmaları engeller. Yaylanmalara karşı sistem direncini arttırmak için gereken ikinci parametre ise 6 dır. Örnekleme zamanını kısaltmak sürücüye daha kısa aralıklarda hızı kontrol etmesi emrini verir. Buda titremeyi engeller, sistemi rezonansa karşı daha dirençli hale getirir.
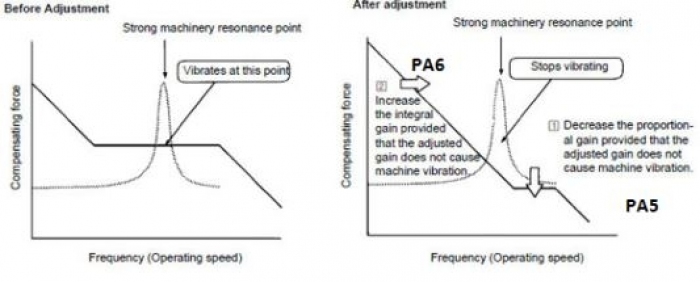
Aşağıdaki grafik hız çevrim kazancı ve ayar parametreleri değiştiğinde servo motor sistemin (yani frekans karakteristikleri) tepki nasıl değiştiğini göstermektedir.
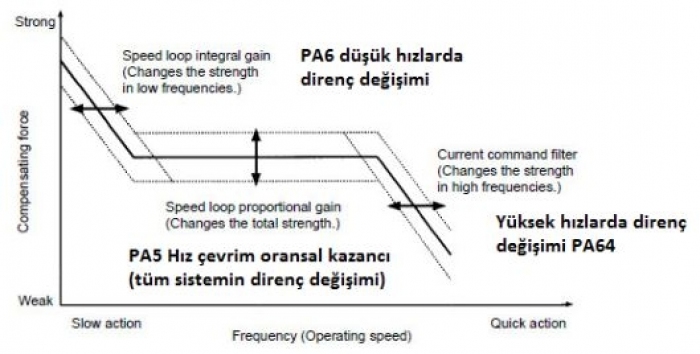
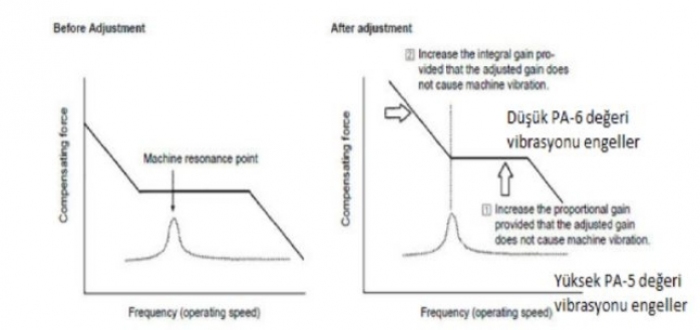
(1) Hız Çevrim Oransal Kazanç (PA5)
Parametrenin etkisi tüm frekans (yavaş, orta ve hızlı) aralıklarında hissedilir.
Kazanç değerini arttırmak doğrultucu direncini ve tepki hızını arttırır, rijitlik artar. Genelde yüksek atalet yüksek değer girilmesini gerektirir.
Mekanik sistemde vibrasyon (salınım) kalmayıncaya kadar attırılabilir.
(2) Hız Çevrim İntegral Kazanç (PA6)
Parametrenin etkisi düşük frekanslarda hissedilir.
Düşük değer integral hızını arttırır, sistemin sapma direncini arttırır, yüksek rijitlik sağlar.Mekanik sistem titreşim vermeyinceye kadar düşürülür.
(3) Amper komut düşük geçiş filtresi(PA64)
Parametrenin etkisi yüksek frekanslarda (hız) hissedilir.
Filtre zaman sabitini arttırmak, ani komut değişikliklerini amper çevrimine girmeden yumuşatır.
Servo Motorlarda bu ayar hız çevrim kazancı (PA5) ve Hız çevrim integral kazancı (PA6) ile mekanik sistem rezonansı önlenemezse etkilidir.
Servo Motor Ayarlama Örneği 1
Aşağıdaki figürler normal ayar örneğidir. (Eğer başlangıç setinde vibrasyon yoksa)
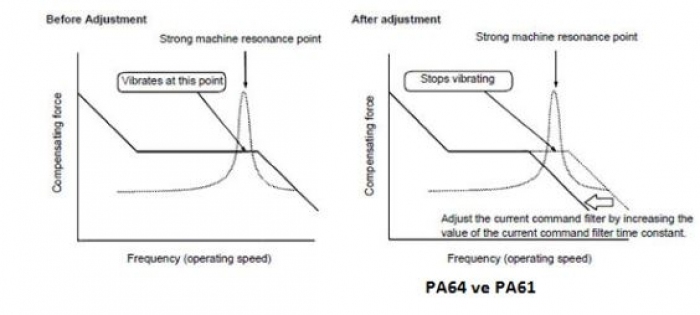
Yüksek hızlarda mekanik sistem rezonans noktası varsa, aşağıdaki şekil ayarlama örneğini gösterir.
Aşağıdaki koşullarda düşük kazanç ayarlarında motorda uğultu vardır ve sistem yüksek frekanslı vibrasyon üretir.
Ayarlama PA(64) amper komut filtre ardından (PA61) amper entegrasyon zaman sabiti kazanç için yapılır. Mekanik sistemdeki rezonans amper komut filtresi zaman sabiti artırarak önlenebilir.
Düşük hızlarda düşük frekanslı vibrasyon üretme durumunda ayarlama örneği.